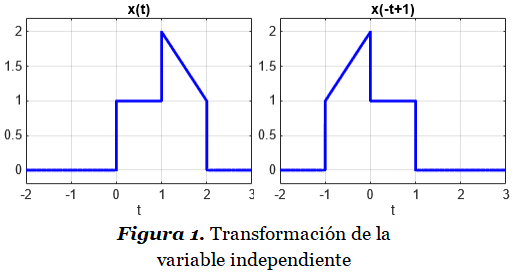
Transformación de la variable independiente en señales y sistemas.
Ejercicio SS1-1.
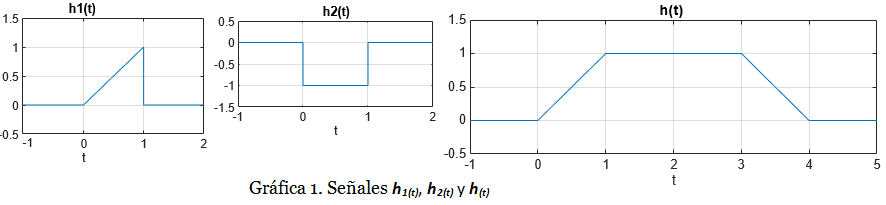
Considere 3 señales denominadas h1(t), h2(t) y h(t). La Gráfica 1 muestra las tres señales.
Responda las siguientes preguntas:
- Escriba la expresión de h(t) utilizando las señales h1(t) y h2(t). Debe emplear transformaciones de la variable independiente necesarias.
- ¿Es h(t) una señal definida en potencia media o en energía? Justifique su respuesta y calcule cada una.
- Graficar dh(t)/dt. Obtenga su expresión analítica utilizando señales elementales.
- La señal z(t) se define como z(t)=-h(-2t+6). Graficar z(t).
Expresión de h(t) utilizando las señales h1(t) y h2(t).
La estrategia que proponemos es considerar que la señal h(t) presenta tres regiones claramente definidas. En la primera región h(t) es una línea recta de pendiente positiva. En la segunda región h(t) es una constante. En la tercera región h(t) es una línea recta de pendiente positiva.
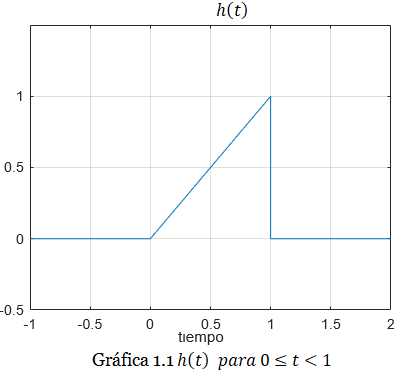
Región 1 (0≤ t <1): la gráfica de h(t) tiene la misma forma que h1(t). Por lo tanto:
\boldsymbol h(\boldsymbol t) = \boldsymbol h_1(\boldsymbol t)\boldsymbol \ \ p\boldsymbol a\boldsymbol r\boldsymbol a \ \ 0 \leq \boldsymbol t < 1
Esto lo podemos observar en la Gráfica 1.1:
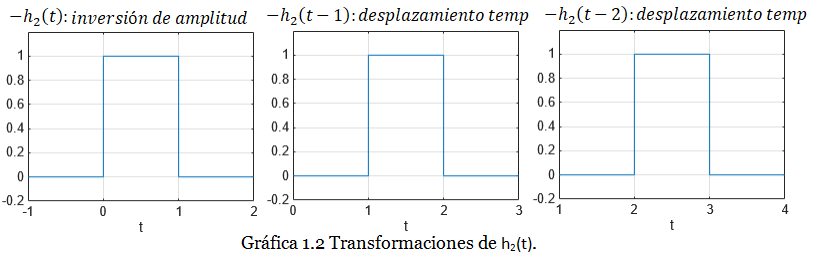
Región 2 (1≤ t <3): la gráfica de h(t) es una constante, por lo tanto debemos utilizar la gráfica de h2(t) y luego de aplicar las siguientes transformaciones transformaciones a la variable independiente:
: inversión de amplitud: desplazamiento temporal
: desplazamiento temporal
Las tres transformaciones las podemos ver en la Gráfica 1.2:
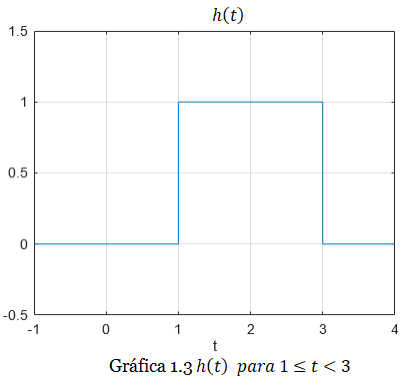
En conclusión:
Este resultado lo podemos observar en la Gráfica 1.3:
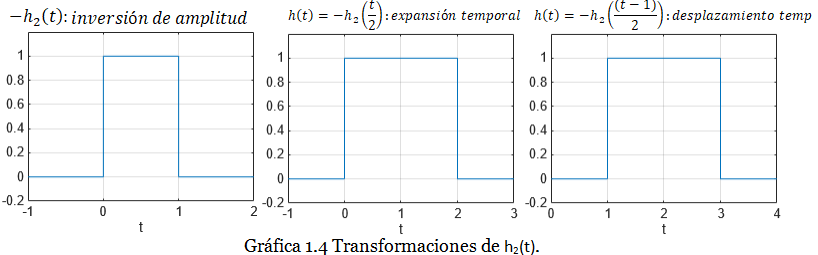
Alternativamente tenemos otra vía y podemos aplicar este grupo de transformaciones sobre h2(t):
: inversión de amplitud: expansión temporal
: deplazamiento temporal
Las tres transformaciones las podemos ver en la Gráfica 1.4:
En conclusión:
Cómo se puede ver este último resultado resulta una fórmula más compacta.
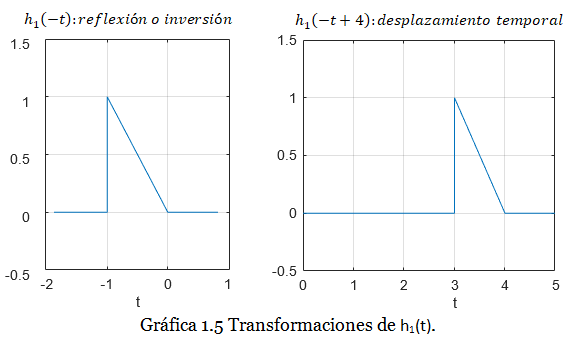
Región 3 (3≤ t <4): la gráfica de h(t) es una recta con pendiente negativa. Deberíamos utilizar la gráfica de h1(t) y luego de aplicar las siguientes transformaciones a la variable independiente:
: reflexión o inversión: desplazamiento temporal
Las dos transformaciones las podemos ver en la Gráfica 1.5:
En conclusión:
En definitiva, se suman las tres regiones y obtenemos:
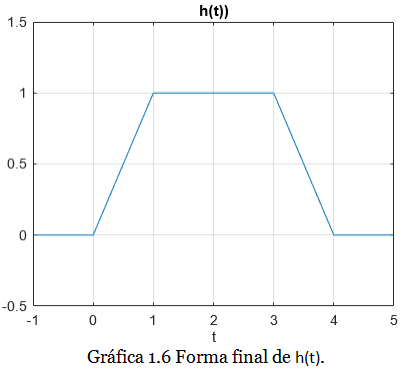
Observamos el resultado final de combinar las tres regiones, en la Gráfica 1.6:
¿Es h(t) una señal definida en potencia media o en energía?
Para decidir si la seña h(t) está definida en potencia media o en energía, revisamos a continuación los siguientes criterios.
Criterios para señales de energía y de potencia.
1. Una señal x es de potencia si y solo si su contenido de potencia promedio P es finita y mayor que cero (0 <Px< ∞), lo cual implica que su contenido de energía es infinita (Ex → ∞). Es el caso de las señales periódicas:
: Señal definida en potencia media (vatios)
2. Una señal x es de energía si y solo si su contenido de energía E es finita (Ex< ∞), lo cual implica que su contenido de potencia es cero (Px= 0). Es el caso de las señales que tienen un inicio y un final (señales de duración limitada):
: Señal definida en energía (joules)
3. Una señal x que no satisface ninguna de las condiciones anteriores entonces no es una señal de potencia o de energía. Ejemplo, la función rampa.
4. Si se trata de una señal sinusoidal de amplitud A se puede demostrar que la potencia promedio es directamente:
5. Se define potencia promedio como la potencia en un intervalo de tiempo:
Con estos criterios pasamos ahora a evaluar si la señal h(t) que nos interesa es una señal de energía o de potencia promedio.
Debido a que h(t) es una señal de duración limitada (ver Gráfica 1.6), ella es claramente una señal definida en energía. Calculamos esta energía de la siguiente manera:
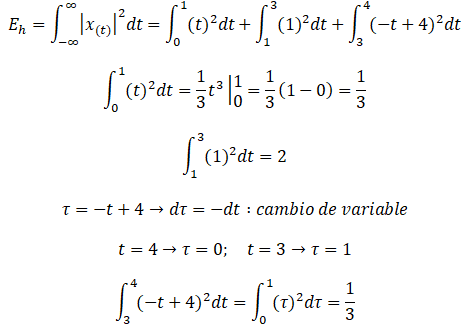
Por lo tanto:
Por su parte, la potencia media es:
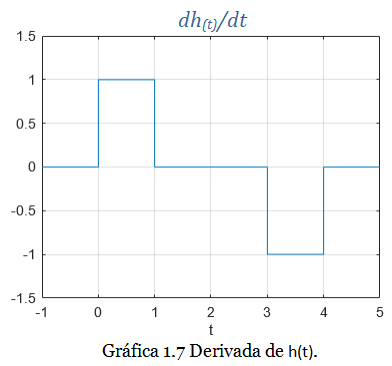
Graficar dh(t)/dt. Obtenga su expresión analítica utilizando señales elementales
Aprovechamos que la señal h(t) presenta tres regiones claramente definidas. En la primera región h(t) es una línea recta de pendiente positiva, por lo tanto la derivada de h(t) en esta región da como resultado una constante de igual valor que la pendiente de la recta. En la segunda región h(t) es una constante, por lo tanto la derivada de h(t) en esta región es cero. En la tercera región h(t) es una línea recta de pendiente positiva, por lo tanto la derivada de h(t) aquí da como resultado una constante de valor negativo. El resultado se observa en la Gráfica 1.7:
Observación: en algunas ocasiones será necesario determinar primero la expresión matemática de la señal para luego derivar. En este caso hemos dicho que h(t) presenta tres regiones. En cada región la expresión matemática de la derivada de h(t) es:
Región 1::Región 2::
Región 3::
Para expresar dh(t)/dt con funciones básicas, definimos la señal elemental “pulso rectangular ” de la siguiente manera:
Definición: La señal pulso rectangular (o pulso cuadrado) es aquella señal analógica cuya amplitud es uno (1) para un cierto intervalo finito de valores de la variable independiente y cero (0) en el resto:

Algunos centros académicos prefieren la siguiente notación para la señal pulso rectangular:
Utilizando esta última notación, podemos expresar dh(t)/dt de la siguiente manera:
Graficar z(t).
La señal z(t) se define como:
El primer paso consiste en reescribir la transformación de la variable independiente:
El orden en que se producen las transformaciones de la variable independiente el siguiente: compresión por un factor de 2:
Luego inversión temporal:
Luego desplazamiento a la derecha (retraso):
Y por último inversión de amplitud:
A continuación la Gráfica 1.8 muestra cada paso:


Es evidente que la gráfica definitiva para la señal z(t) es la Gráfica 1.9:

Te puede interesar:
- Se resuelven ejercicios de Señales y Sistemas 1 y 2, con carácter de Urgencia. EN MENOS DE 24 HORAS (precio aprox. por cada ejercicio (o cada pregunta): 13.7 euros)
- Clases Online: Te Enseño este tema con paciencia y pedagogía. Podemos resolver ejercicios durante la clase (14.7 euros la hora)
- Contacto: Prof. Larry, Whatsapp: +34747458738, dademuch@gmail.com
- Otras áreas: Análisis Sistemas, Procesamiento de Señales, Simulación Matlab/Simulink, Sistemas de Control,
- Modelo y Análisis Matemático de Sistemas Eléctricos, Electrónicos, Mecánicos (MRA), Electromecánicos…
Artículos relacionados:
Linealidad e Invariancia en el tiempo – Teoría (memoria, estabilidad y causalidad).
Función de Transferencia – Teoría
Diagrama de Bloques – Teoría y Práctica.
Prof. Larry. Estudios:
Escuela de Ingeniería Electrónica de la Universidad Simón Bolívar, USB Valle de Sartenejas.
Escuela de Ingeniería Eléctrica de la Universidad Central de Venezuela